Proyectos
Robot Balancista (self balancing robot)
Hardware utilizado:
ATmega1284p (programa cabe en otro micro más chico)
MPU6050 (sin uso de DMP)
L298N (ebay)
Ruedas y motores de ebay o dx
Módulo RF XL7105 (para control con joystick)
Módulo serial-bluetooth HC-05 (control con Android y programación)
6 Baterías ICR18650 de computador muerto (configuracion 3s2p)
Otros materiales de ferreteria
Detalles
Para estimación del ángulo de inclinación se utiliza un acelerómetro y un giroscopio (MPU6050) y un filtro complementario.
El sistema tiene un controlador PID de ángulo que fue ajustado por prueba y error, no hay control de velocidad ya que los motores no poseen encoder.
Este proyecto se inició a mediados de enero del 2015 y se obtiene el resultado del video a mediados de febrero del 2015.
Nueva versión
Algunas aplicaciones útiles
Transporte de cerveza
 |
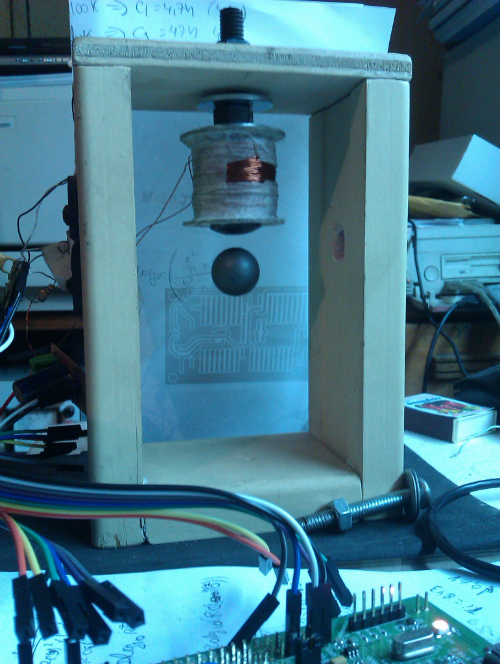
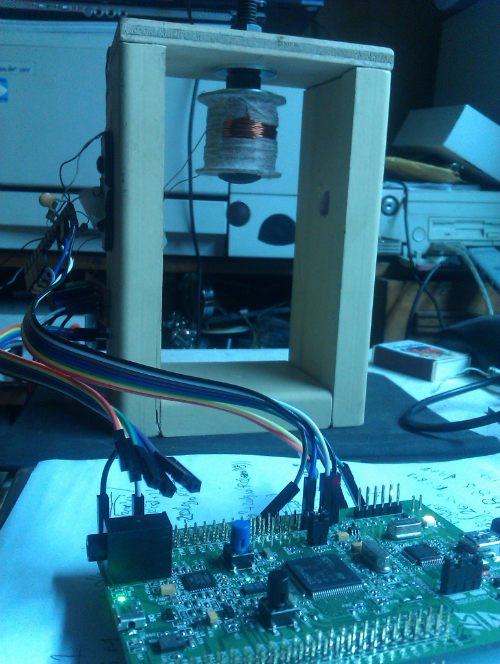
Levitador electromagnético
 |
 |
 |
Hardware:
LED IR
Fototransistor
Filtro RC
Tarjeta STM32F4 Discovery (ARM)
Esferas de acero (no recuerdo sus masas)
Mosfet + driver + resistencias
Un perno y unas tuercas
Alambre de cobre (yo lo reciclé de un transformador de microondas)
Madera
Detalles
El controlador implementado es un PD.
Proyecto “terminado” en marzo del 2014. Quiero probar otros controladores o por lo menos implementar un PID completo.
Circuito de Chua
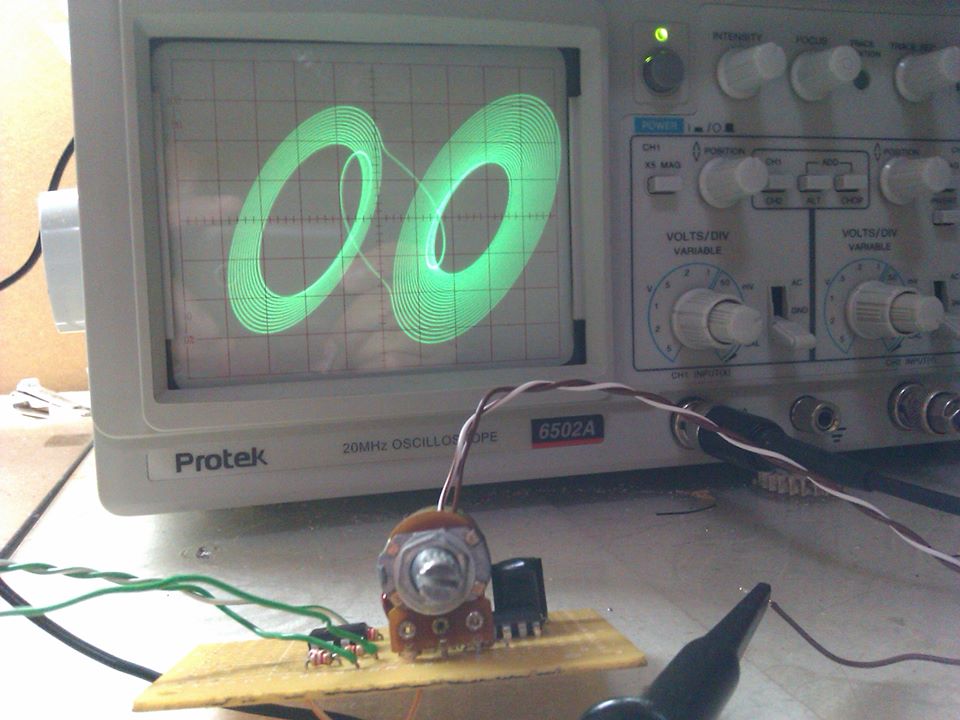 |
Lo construí solo para probar el osciloscopio. Circuito extraido de acá.
Foto de diciembre de 2013.